In order to make the data collected by the simulations as well as the simulations themselves more comparable, the individual simulations were organized in a 2-dimensional matrix system.
On the vertical axis we define the agent complexity or ACL (Agent Capacity Level), starting from the simplest possible agent (ACL 1.0 simulating an agent unaware of any surrounding objects or other agents blindly wandering the scene). In each successive step, the agents capabilities are extended and therefore the complexity of the simulation increased (i.e. collision detection, object interaction, agent interaction, etc.). The result is an accumulative build up of potential agent faculties that allows for direct comparison of individual ACLs and therefor speculation on possible success criteria and relevance of agent capacities.
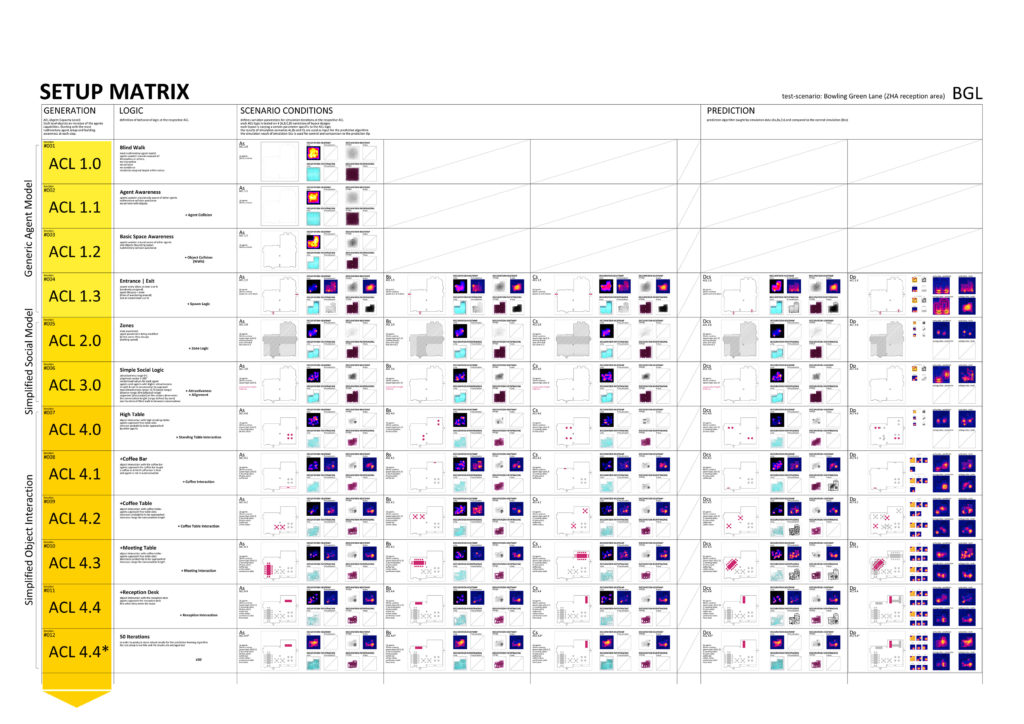
On the horizontal axis, each new capacity is tested in four parallel simulation scenarios (A, B, C, D) in order to produce a more robust data set. Each scenario is a slight variation on capacity specific parameters. Varying parameters include number of agents, floor plan layout, location of doors and other interaction objects such as tables and chairs. In an additional step the collected simulation data from the first three simulations (A-C) is used to train a prediction algorithm that finally is tested against the empirical data set in scenario D for accuracy, where the prediction algorithm is confronted with a novel scenario condition. The only parameters that remain constant are a maximum number of 16 agents per simulation and the total run time of 30 min. For ease of comparison the data collected during the run time is used to create a number of visual quantifiers. Two of which are a heat map showing the concentration of occupancy and a trail map tracking the movement of each individual agent. The heat map being the most relevant as it is the same format as the output of the prediction algorithm.
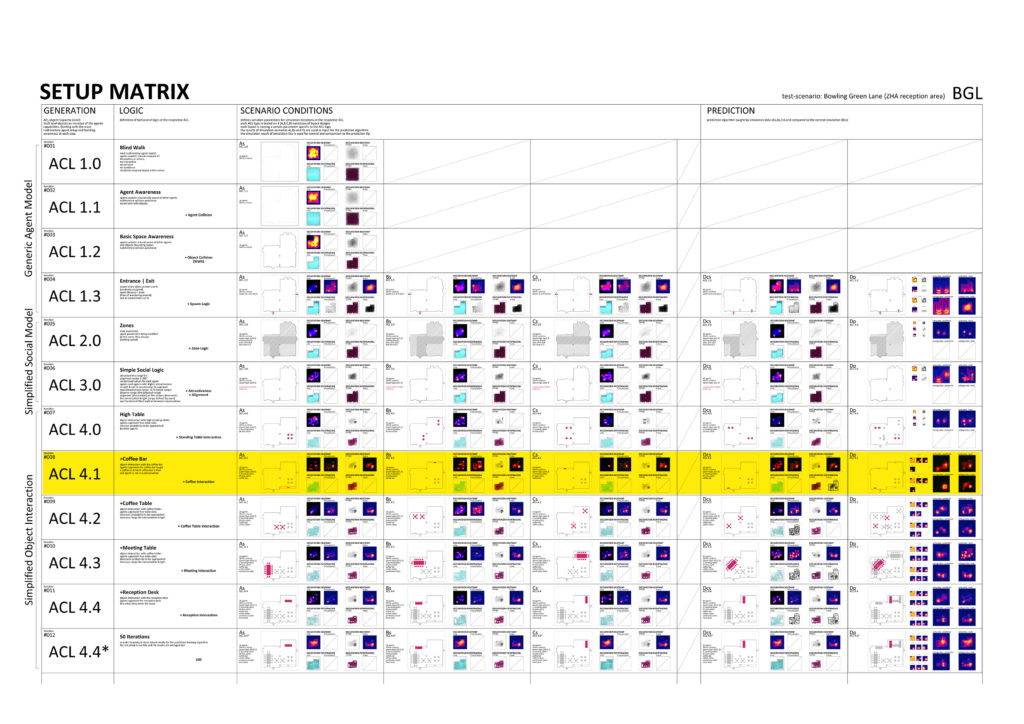
ACL Levels themselves are strategically grouped by chapters.
The first chapter defines a simplified agent model based on game engine standards (collision, stamina, spawning, etc.). The second chapter is a simplified social model creating a logic to rudimentary define agent interaction (who is talking to whom, etc.). Third is a simplified behavior model, where again a game engine standard logic is used to define behavior (behavior trees). The successive chapters will dive into more advanced versions of agent models (vision, hearing, etc,), social models (SNA, group dynamics, etc.) and behavior models (utility driven behavior) with the goal to finally reach a semiotic agent model capable of interpreting architectural environments. In an additional step the collected simulation data from the first three simulations (A-C) is used to train a prediction algorithm that finally is tested against the empirical data set in scenario D for accuracy, where the prediction algorithm is confronted with a novel scenario condition.


{kind=link}